馬鞍山市環銳重工機械制造有限公司


熱線電話:
15955516252
86-0555-2925298
平衡吊操作臂的運行原理作者:環銳重工
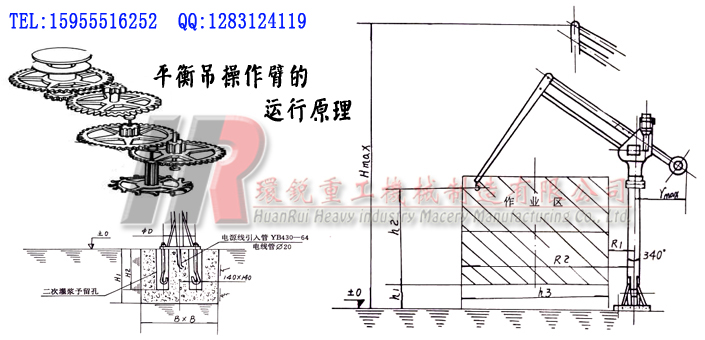
在日常操作平衡吊過程中,操作臂起了關鍵性的作用,因為它是一個平行四邊形的四連桿機構,在要起升貨物時,起動電動機正轉,經減速后使豎直放置的絲桿旋轉,此時的螺母向下移動,安裝在螺母前后兩側的銷軸帶動滾輪沿豎直導槽也隨著向下運動(螺母、銷軸、滾輪及其上方的另一導向滾輪組成一個能上下運動的部件)。這時由于水平滾輪在導槽上的位置不變,大橫臂在螺母的帶動下向上翹起,使起重臂向上運動,物品被提升。反之,使電動機反轉,絲桿帶動螺母向上運動,由于水平滾輪不動,使起重臂向下運動,吊鉤上的物品作下降運動。 整個運行下來,操作人員既方便又快捷,平衡吊就是運用了操作臂的運行原理才得以方便快捷。
|